第10回 地域交流ワークショップ
「地域の課題への挑戦」
[2014.05.30 更新]
INDEX: 概要
開催報告:new
皆さまのご協力のおかげで、産技連7組織の16名に一般参加者を合わせて41名の方にご参加いただき、 富山でのワークショップを盛況に開催できましたことを御礼申し上げます。地元富山県工業技術センターの鳥山所長の挨拶で始まり、午前の第1部では、各地の公設研による話題提供としてさまざまな研究開発や地元企業の人材育成へ の取り組みが紹介され、 産議連の新しい活動としてロボット分科会の紹介がおこなわれました。今後は、分科会同士で参加者がオーバーラップするため、情報共有を進めて一緒に活動を 進めて行きたいと思います。特に富山県さんの県内企業の若手技術者の育成事業が公設研の敷居を下げて地元企業さんとの連携を深める取り組みとして印象的で した。
午後の第2部では、オーギャの水島昌徳氏から社名の由来から始まり静電容量型触覚フィルムセンサの紹介、ワコーテックの岡田和廣氏からは多くの特許を取 得している力覚センサと開発経緯の紹介、不二越の丸山章氏からは産業ロボットの開発の歴史と最新の各種センサと連携したロボット制御の紹介、ミヤモリの宮 森利隆氏からはユニークなロボット用カバー(ロボウェア)の紹介、小矢部精機の砂博信氏からは高速搬送を実現するためにニーズに応じた設計コンセプトのユ ニークな具現化の紹介をそれぞれいただきました。
最後に、京都府中小企業技術センターの坂之上悦典氏から、来年度の第11回地域交流ワークショップの案内が行われ、産議連製造プロセス部会の山内副部 会長から、3Dものづくり特別分科会の紹介とともに閉会挨拶をいただきました。また、ワークショップ後には、例年のように有志で交流会に繰り出して親睦を 深めることができました。
最後に、いろいろと便宜を図っていただいたRoboMec2014実行委員会、ならびに地元の富山県工業技術センターの皆様に感謝いたします。
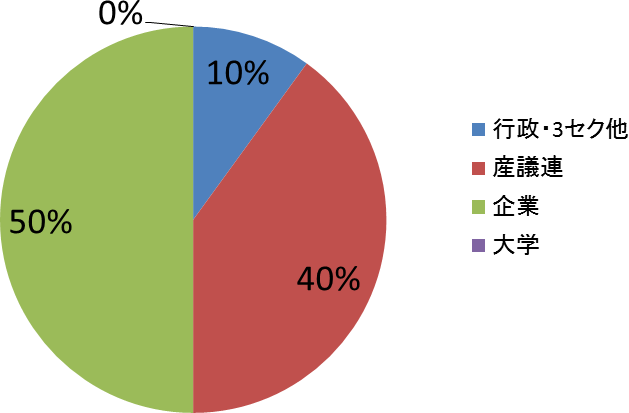
参加者の分析
概要:
全国から集まるロボメカ研究者・技術者の相互交流の機会を生かして、 情報交換や議論を行いたいと思います。各地域には、産地技術や農林水産品、 観光等の地域産業資源へのロボメカ支援研究事例をはじめ、特徴ある 産業集積から生まれた産学官連携や地域間連携による研究活動事例など、 地域ならではのロボメカ物語があります。今回は、素晴らしい技術を有する地元の企業から研究・開発や地域連携・産学連携にまつわる物語を、 そして、地域課題に挑戦している全国の研究機関から、研究に関する苦労、苦心、 工夫など泥臭いことも含めて、成功、失敗にとらわれず発表していただき、 今後のロボメカ研究の発展と地域連携の活性につながる知見を広げることを重視した フランクかつ有意義なワークショップにしたいと考えております。
- 共同主催:
- 日時:
- 2014年5月25日(日) 10:00〜16:15
- 場所:
- 富山国際会議場 2階
多目的会議室 (203室)
- 〒930-0084 富山市大手町1番2号 [地図]
TEL:076-424-5931 FAX:076-493-7170
(ロボティクス・メカトロニクス講演会2014のチュートリアル・ワークショップ会場)
(2日目からのポスターセッションの会場(富山市総合体育館)とは異なることに注意)
- 参加費用:
- 無料
(本ワークショップのみ参加・聴講の場合)
※Robomec2014 のポスターセッション(5/26-28)にも参加する方は、講演会の参加登録が必要。 - 申し込み先:
- 当日、富山国際会議場に直接お越しください。
ワークショップ、チュートリアルのみご参加いただく参加者様は大会登録不要ですが、富山国際会議場のワークショップ・チュートリアル用受付に一度お立ち寄 りいただくようお願い致します。大会の参加証代わりに、衣服にお貼りするシールが配布されます。
また、多目的会議室入り口の受付にてお名刺をお渡しください。
プログラム:
第1部 『地域産業を支援するメカトロニクス』
- 10:00-10:10 開会挨拶
- 鳥山素弘(富山県工業技術センター 所
長)
- 10:10-10:30 話題提供1
- 都産技研におけるロボット事業の取組みに
ついて
佐々木智典(東京都立産業技術センター)
都産技研では、中小企業の支援としてロボットの研究開発を行ってきました。 今回は、1)ベースロボット事業、2)バルーンロボット、3)運搬ロボットの3つを話題提供いたします。
- 10:30-11:50 話題提供2
- 鳥取県産業技術セ
ンターのKinectセンサ関連の研究について
福谷武司 ( 鳥取県産業技術センター機械素材研究所計測制御科 特任研究員)
鳥取県産業技術センターで3Dセンサ「Kinect」を使って行っている研究の概要を紹介します。 この中で、簡単安価に外部ハードウェアを動作させることができる「USB-IO」を使った、 ジェスチャーによるハードウェア操作や、現場作業者の動作解析への適用を想定した、 手先の動線軌跡表示について説明します。
- 11:50-11:10 話題提供3
- 富山県工業技術セ
ンターにおける取り組み
上野実 ( 富山県工業技術センター)
富山県工業技術センターの紹介とメカトロニクス関連の研究課題、 並びに県内企業の若手技術・研究者を受け入れる「若い研究者を育てる会」による 人材育成への取り組み状況について紹介します。
- 11:10-11:30 話題提供4
- 水田用小型除草ロボット(アイガモロボット)の開発
遠藤善道 ( 岐阜県情報技術研究所 メカトロ研究部 部長)
岐阜県情報技術研究所では、岐阜県中山間農業研究所、農林事務所、岐阜大学、民間企業と共同で、 水田用小型除草ロボットの開発を進めています。 本ロボットは、クローラで芽が出たての雑草を掻き出したり、泥水で雑草の光合成を阻害して、 雑草の繁茂を抑えます。画像処理で稲列を認識し、稲列に沿って自律走行します。
[プ レゼン資料]
- 11:30-11:40 話題提供5
- 産業技術連携推進会議 ロボット分科会の紹介
河井良浩 (産業技術総合研究所 イノベーション推進本部 総括企画主幹)
- 2月に開催された産業技術連携推進会議の総会にて、
中小企業の現場への産業用ロボット導入の支援を目指し、
3Dセンサ技術、制御技術等の知能ロボット関連の技術を対象に、
公設研の皆さんと産総研が連携して問題解決や人材育成に取り組む新組織として、
情報通信・エレクトロニクス部会の下にロボット分科会の設立を案内いたしました。
技術的に関連の深いメカトロニクス分科会の皆さんにも一緒に協力して活動できることを期待して、
現在の取り組みを紹介します。
[プ レゼン資料]
- 11:40-12:00
- 総合討論
午後 第2部 『ロボティクス・メカトロニクス技術で支える元気な地元企業』
- 13:30-13:55 話題提供1
- 薄くフレキシブル
な静電容量型触覚フィルムセンサ
水島昌徳 (株式会社オーギャ 代表取締役)
ウェアラブルな入力機器や医療・介護機器などの分野において、 薄くしなやかでアナログ検出が可能な荷重検出装置の実現が期待され、 現在、様々な検出方式が提案され研究開発進められている。 その中のひとつとして、 我々は導電ラバーと樹脂フィルムにスクリーン印刷した電極とで構成した 静電容量型の感圧フィルムセンサを提案し開発を続けている。 検出部のみならず、非常にシンプルな信号処理基板やデータ取込ソフトウェアも共にユーザーに提供しており、 全く新しい電子機器等の実現に貢献できるよう努力している。
- 14:00-14:25 話題提供2
- 静電容量型6軸力
覚センサ及びトルクセンサの開発
岡田和廣 (株式会社ワコーテック 社長)
従来の力覚センサは、検出原理として歪ゲージ式が主流であり、 生産性の低さから価格面で課題や壊れ易いという問題で普及していない。 当社では、MEMS型の加速度センサやジャイロセンサが静電容量型であることに着目し、 1組の平行平板で力とモーメントの6軸成分を検出可能な静電容量型6軸力覚センサ (Dyn Pick)を開発した。Dyn Pickは32bitマイコンを内蔵し、 各種インターフェースを用意し、また、独自のストッパー機構により壊れにくいという特徴がある。 最近のロボットの80Watt規制の改定により、トルクセンサの開発が急務と考え、 リング型のトルクセンサを開発した。 トルクセンサは力覚センサと同様に、静電容量方式であり、 32bitマイコンとストッパー機構を内蔵している。ここでは、これら2つのセンサについて概説する。
- 14:30-14:55 話題提供3
- 産業用ロボットの開発と適用事例の紹介
丸山章 (株式会社不二越 技術開発部AR開発プロジェクトチーフ)
(株)不二越では、「ものづくり」にこだわり、工具、軸受け、 油圧機器などの「ものづくり」の要素として欠かせないものを作っている。 その中でも産業用ロボットは、軸受け、油圧機器など不二越の持てる技術を結集して開発されており、 自動車メーカを中心に産業界に幅広くご利用いただいている。 そこで、不二越の産業用ロボットとその制御装置の開発の歴史から始まり、 産業用ロボットの必要な要素技術とその実現方法、 そして最新の3次元視覚センサや力センサを利用したロボット適用技術について紹介する。
- 15:00-15:25 話題提供4
- ロボットウエア
宮森利隆( 株式会社ミヤモリ 代表取締役会長)
スポー ツウェア等のアパレルメーカーである弊社が、地元自動車部品メーカーからの相談をきっかけに、 ロボット用カバー(ロボットウェア)の開発を行っています。 従来のロボットカバーの多くは、耐熱性繊維の織物にラミネート加工を施したものを基布とし、 可動部は蛇腹構造を採用していました。 この方法は、重い、汚れる、耐久性が悪い、価格が高い、等の問題が現場で指摘されていました。 弊社では、これらの問題を解決するために、 ニットメーカーや富山県工業技術センターとプロジェクトチームを組み、 全く新しい思想によるロボットウェアを開発しました。 十分な防炎性を保ちながら伸縮性のある基布を用いていることが大きな特徴で、これにより、 従来の問題点が大幅に改善されました。 ニッチな分野ながら、自動車メーカー、機械メーカー等を中心に、少しずつ展開を広げており、 この開発の経緯をご説明します。
- 15:30-15:55 話題提供5
- ECO社会の実現のための軽量化技術を支
えるロボット制御技術について
砂博信 (株式会社小矢部精機 技術部部長)
近年自動車におけるCO2排出量の低減や燃費向上などECO社会の実現に対する要望が高まっています。
自動車のECO性能を向上させる手段として『軽量化』が上げられます。 軽量化の方策として、アルミニュウム合金の採用や適材適所の鋼板板厚を実現するTWB、 強度を満足しながらの鋼板薄肉化のためのホットプレス技術、カーボンファィバーの採用などありますが、 これらを成立させるための技術要件には、①『省人化』②『高速化』③『高精度化』があり、 これらをバランスよく達成しないと 製品として世の中に送り出すことが出来ません。 これらの技術要件を達成するために、ロボット制御技術を用いた産業機械が用いられ、 また、どのような技術が用いられているのか、ご説明します。
- 16:00-16:10
- 次回案内
坂之上悦典 ( 京都府中小企業技術センター)
- 16:10-16:15
- 閉会挨拶
山内真 ( 産議連 製造プロセス部会 副部会長)
[プ レゼン資料]
実行委員会(案):
- 上野実 (富山県工業技術センター) [実行委員長]
- 坂之上悦典
(
京都府中小企業技術センター)
[副実行委員長(分科会事務局(ワークショップ担当)]
- 後濱龍太 (東京都立産業技術センター)
- 石黒智明 (富山県工業技術センター)
- 遠藤善道 ( 岐阜県情報技術研究所)
- 河井良浩 (産業技術総合研究所)
- 小林耕治 ( 長野県工業技術総合センター)
- 坂下和広 (東京都立産業技術センター)
- 佐々木智典 (東京都立産業技術センター)
- 田口喜祥 ( 長崎県工業技術センター)
- 田中孝彦 (静岡県浜松工業技術支援センター)
- 谷川民生(産業技術総合研究所)
- 辻善夫(岡山県工業技術センター)
- 新見浩司 (鳥取県産業技術センター)
- 朴忠植 (大阪府立産業技術総合研究所)
- 長谷川茂 ( 静岡県浜松工業技術支援センター)
- 福谷武司 (鳥取県産業技術センター)
- 道野隆二 ( 熊本県産業技術センター)
- 三輪昭生(岡山県工業技術センター)
- 山内真(産業技術総合研究所)
- 吉田裕亮 (鳥取県産業技術センター)
- 神徳徹雄 (産業技術総合研究所) [地域交流ワークショップ2013実行委員長]
- 杉山 治 (静岡県浜松工業技術支援センター) [地域交流ワークショップ2012実行委員長]
- 椋代 弘 ( 岡山県工業技術センター) [地域交流ワークショップ2011実行委員長]
- 吉川 毅 (北海道立総合研究機構) [地域交流ワークショップ2010実行委員長]
- 石田康弘 (福岡県工業技術センター) [地域交流ワークショップ2009実行委員長]
- 北沢俊二 (長野県工業技術総合センター) [地域交流ワークショップ2008実行委員長]
- 鈴木慎一 (北海道立総合研究機構) [地域交流ワークショップ2007実行委員長]
- 藤原基芳 ( 三重県工業研究所) [地域交流ワークショップ2006実行委員長]
- 毛利謙作 (高知県工業技術センター) [地域交流ワークショップ2005実行委員長]
お問い合わせ:
- ワークショップ事務局: chiiki2014-info-ml
(at) aist.go.jp
懇談会:
ワークワークショップ後に、 富山市内で有志による懇談会を行います。(公設研の)話題提供いただく方へ:
当日配布資料がございましたら、30部ほど印刷して持参いただくようお願いいたします。また、配付資料、及び、プレゼン資料で、ここだけ情報を削除したファイルを提供いただければ、ホームページに掲載いたします。よろしくご協力下さい。
ボランティア募集:
日本機械学会 ロボティクス・メカトロニクス講演会2014が5月に富山市で開催されます。 今回も併設行事として、ポスターセッション前日となる5月25日 (日)に地域交流ワークショップを開催したいと考えております。 皆さまの積極的なご協力をお願いいたします。 つきましては、旅費を確保いただくとともに、以下の協力をいただければ幸いです。1)実行委員会のメンバーとして協力
今年も、実行委員会形式で運営していきたいと思います。 全国から集まる生産情報・ロボメカ研究者・技術者の 相互交流の機会を生かしたいと考える全国の方々のボランティアを募集しております。 ボランティアいただける方は、事務局まで連絡いただければ幸いです。
2)話題提供者として協力
各地域の状況報告をワークショップで発表いただき、 議論していただくようお願いいたします。
3)参加者として協力
旅費を確保して、ワークショップに参加いただくようお願いいたします。
ロボティクス・メカトロニクス講演会は日本機械学会のロボティクス・メカトロニクス部門が主催する 千人以上の参加者を集める部門講演会です。 規模が毎年拡大しており、今年は初日にワークショップやチュートリアルなどの企画があり、 2日目から4日目にかけて、一般発表となるポスター形式の発表が行われております。
- 講演申込 2014年01月24日(金)
- 原稿提出 2014年03月14日(金)
(参考リンク)
- ロ ボティクスメカトロニクス講演会2014(富山)
- 第9回地域交流ワークショップ(つくば)
- 第8回地域交流ワークショップ(浜松)
- 第7回地域交流ワークショップ(岡山)
- 第6回地域交流ワークショップ(旭川)
- 第5回地域交流ワークショップ(福岡)
- 第4回地域交流ワークショップ(長野)
- 第3回地域交流ワークショップ(秋田)
- 第2回地域交流ワークショップ(東京)
- 第1回地域交流ワークショップ(神戸)
- 産議連メカトロニクス分科会
お問い合わせ 及び 話題提供申込先:
ワークショップ事務局: chiiki2014-info-ml (at) aist.go.jp
神徳徹雄、谷川民生